
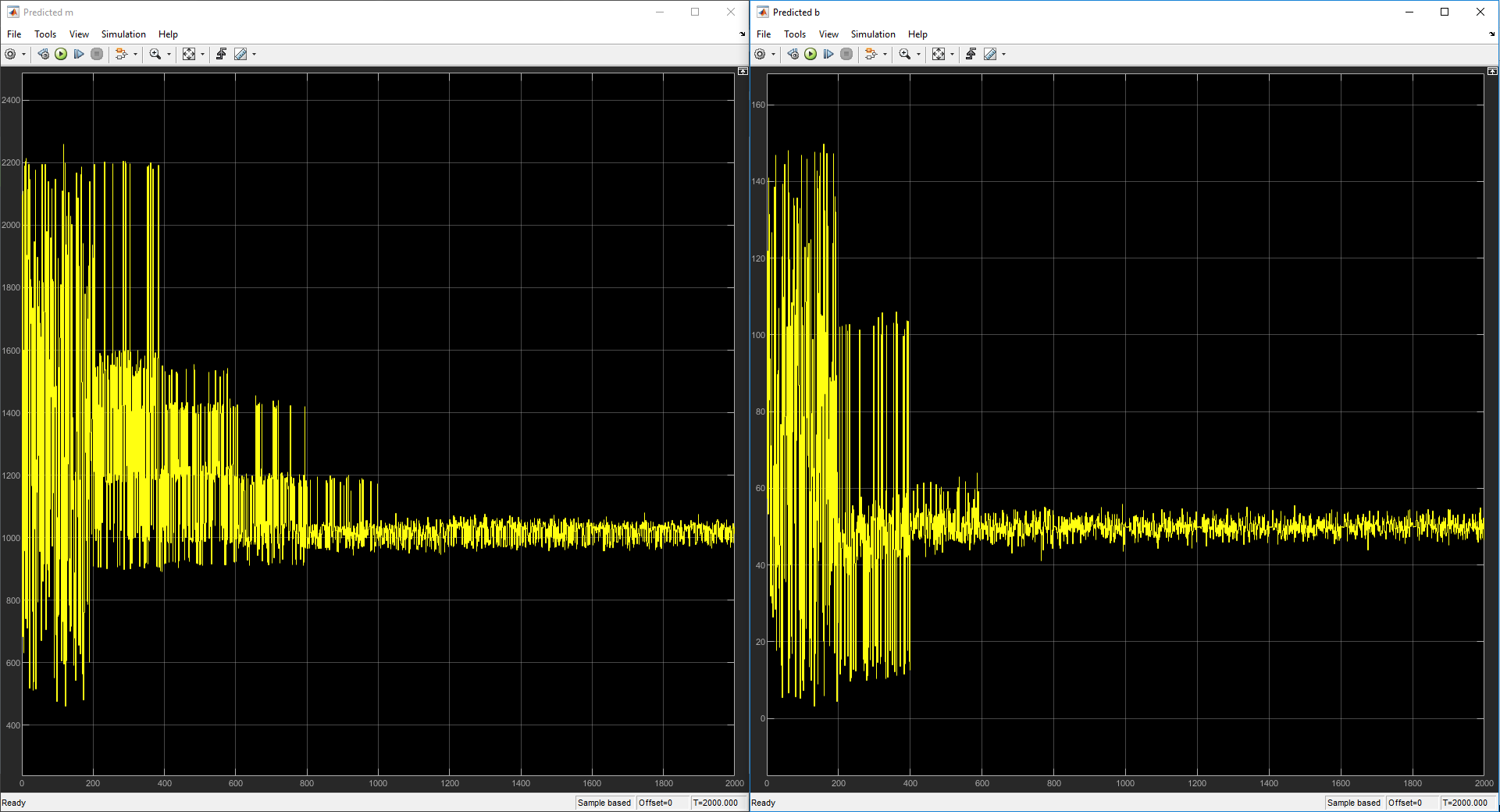
Particle filters provide an effective stochastic method for predicting an unknown distribution; this makes them suitable for predicting the underlying properties of dynamical systems. Utilizing these predicted properties in combination with Ackermann’s formula can provide the ideal control law for producing the desired system response. We present a particle filter speed controller for predicting the underlying properties of a vehicle system and then providing the appropriate control law to set the steady-state system response equal to the reference value.
The Simulink model are available on GitHub here under an MIT License