Formal Methods 101: Induction

Math, Science, Airplanes


Abstract
Aircraft collision avoidance is a pervasive need in this modern
age of flight. We present a 2-D automated collision avoidance flight
controller for automated collision avoidance amongst 2 aircraft.
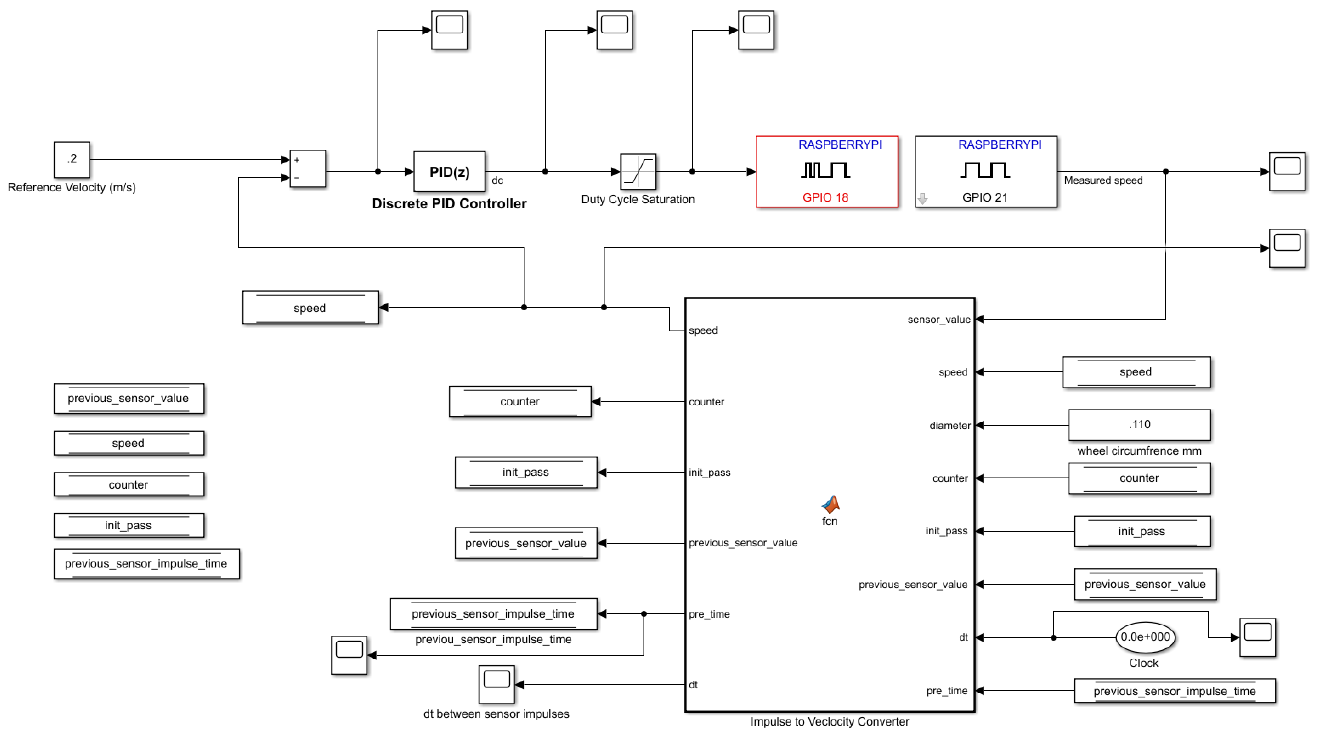
This controller is designed to satisfy safety and liveness
requirements, implemented using Simulink and Stateflow, and
verified using safety and liveness monitors.
The Simulink & Stateflow model is available on GitHub here under an MIT License