Posted on August 7, 2019March 7, 2023Action Schema Neural Networks: Generalized Policies for Stochastic Planning Problems in the Wargaming Domain
Posted on May 3, 2019March 7, 2023Improvements to Feed-Forward Neural Networks Used to Classify Forest Type Covers Based on Cartographic Features
Posted on May 3, 2019March 7, 2023Analysis of N-Queens Stochastic Algorithms Using Probabilistic Model Checking
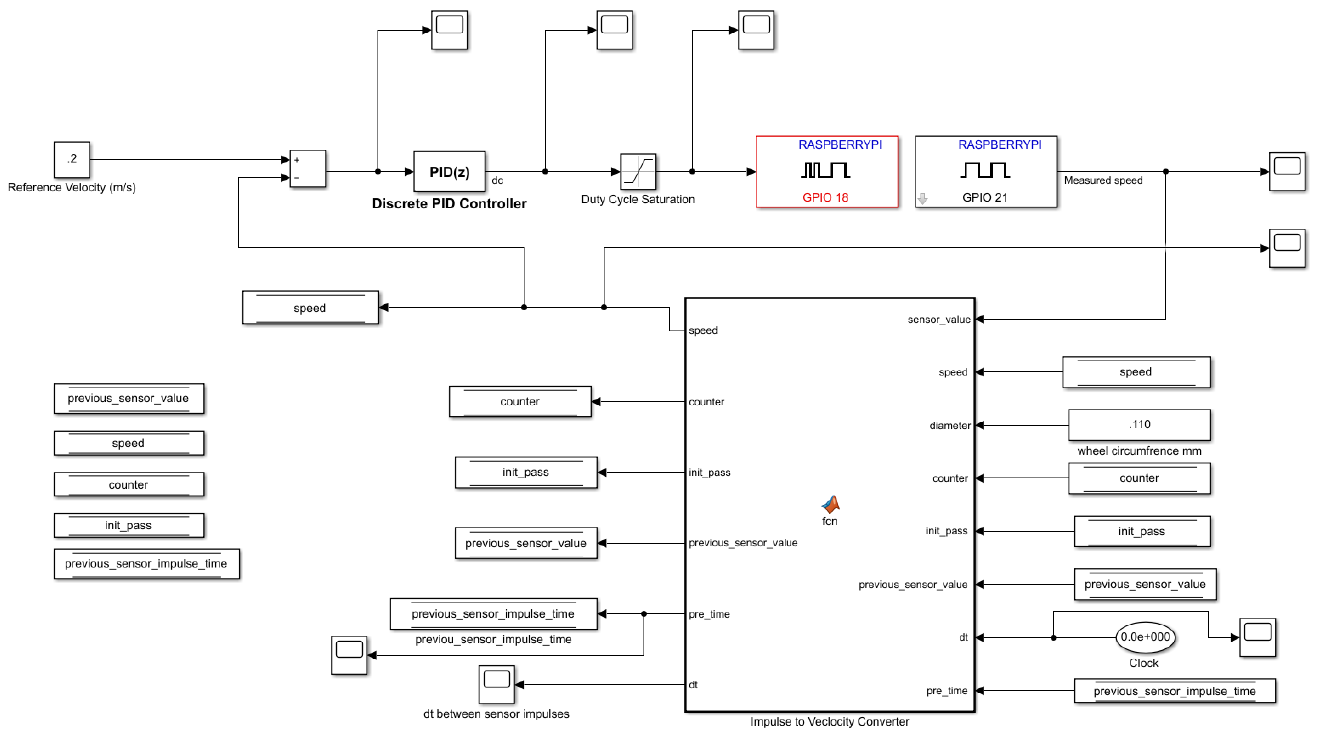
Posted on May 3, 2019March 7, 2023Model-Based Design of a Closed-Loop Speed Controller for a Hybrid System
Posted on April 4, 2019February 23, 2023Neural Networks With Minibatch Stochastic Gradient Descent and Adaptive Moments (ADAM)
Posted on March 19, 2019February 23, 2023Neural Networks with Minibatch Stochastic Gradient Descent and Momentum
Posted on March 7, 2019February 23, 2023Neural Networks of L-Layers, N-Neurons with Dropout and L2 Regularization